Motion control is an important part of robotics. It is complex and costly, not only regarding time, but also resources, and material. Most approaches and programs for motion control require high levels of expertise. Therefore, we developed the Maitools Simulator, an easy to use and cost-efficient tool to define robots, environments, and tasks. The focus lies not on the hardware, but on the software, and Macroact's autonomous control solution enables any type of robot to learn and optimize its movements, and manage environmental variables, which significantly minimizes development costs.
Part specifications, setting components, and target values of the robot can be conveniently entered in the simulators easy to use interface. Because of the complexity to define a robot, this process is conducted locally on your PC or laptop.
When executing the learning, high-spec computing resources are required, and the data will be sent to the cloud, where the learning process takes place.
Take advantage of all the benefits:
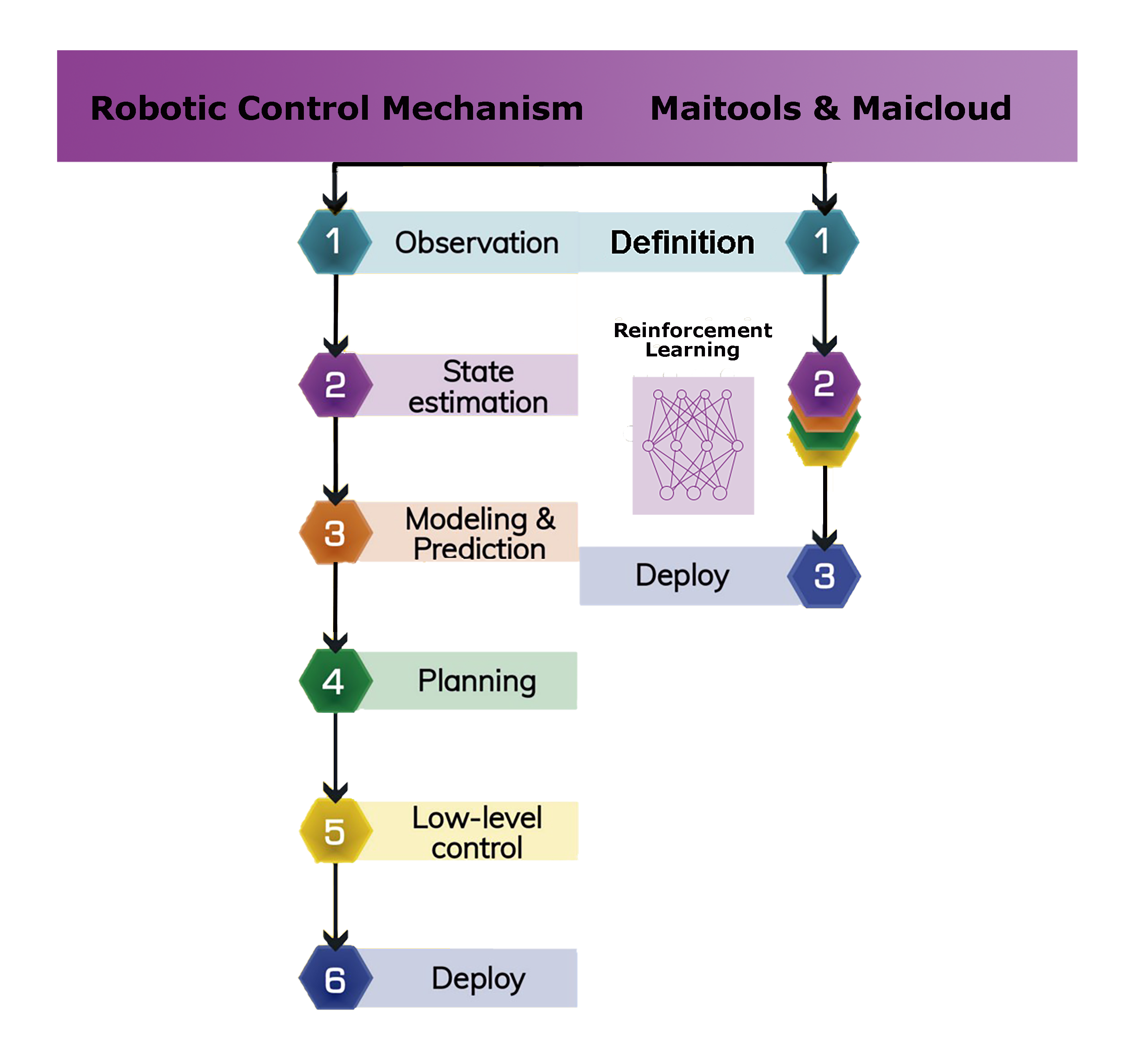
Maitools and Maicloud is a two-step-solution to support robot development.
Cost-efficient and time-saving. For beginners, professionals and businesses alike.

· The URDF or GUI-type input box to enter the part's specifications, components, and target values are provided.
· Choose from a list of basic parts most commonly used.
· The platform is made with a Java-based rich client platform (RCP) for easy use on a PC.
· A 3-D screen is used to easily set up robot tasks.

· Output range of each part's specification is converted into training-data.
· The data is transferred into the AI-engine.
·The robot learns, what the most efficient movements are.
· Benefit from a variety of algorithms to find the optimal motion for specific tasks.
· First, the robot learns the capabilities of its components, and second, it learns to process a specific task.

· As a client, you are provided with a display to monitor various cloud computing settings and learning processes.
· After the learning process is completeted or if it is still ongoing, an API- or ROS-package is offered to transmit the virtually acquired data so that learning can be continued in the real robot.
· Extraction of the data after the task is completed.